
Facilities
Equipments

Heat Transfer
Room no. : 3309
Laboratory In-charge: Prof. (Dr.) M. B. Chaudhari

Refrigeration and Air Conditioning
Room no. : 3007
Laboratory In-charge: Prof. (Dr.) L. D. Mangate
Heat Transfer
Room no. : 3309
Laboratory In-charge: Prof. (Dr.) M. B. Chaudhari
Refrigeration and Air Conditioning
Room no. : 3007
Laboratory In-charge: Prof. (Dr.) L. D. Mangate
Heat Transfer
Room no. : 3309
Laboratory In-charge: Prof. (Dr.) M. B. Chaudhari
Refrigeration and Air Conditioning
Room no. : 3007
Laboratory In-charge: Prof. (Dr.) L. D. Mangate
FFT analyser: Swantech make, 4 Channel, 0 – 20 kHz

Sound Level Meter:
- 2250-L Series Sound Level Meter
- 2250-L-D30
- (Sound Level Meter)
- 2250-Light-G4 with 1/1 Octave and 1/3 Octave Frequency Analysis Software
- AO-0697-D-050 (Microphone)
- Cable, Microphone, circular-1B 10-Pin(M) to circular-1B 10-pin(F), 5m, max. +70 0C

NI Instruments:
- Uniaxial and Triaxial Sensors
- Pressure Sensors
- Temperature Sensors
- 4 Channel Data Acquisition System
- Labview software
Five Gas analyser (AVL):
Measurement of CO,HC, NO,CO2 and O2 for Petrol as well Diesel engines
Smoke Meter (AVL)
Measurement of smoke during steady state and free acceleration

Laboratory Equipments
Product Innovation Laboratory
This laboratory is sponsored by Dassault Systems and is currently used for the Honor course “3D Printing Technology.” Students use a 3D printer to prepare 3D-printed models of different mechanical components. The lab also has computer terminals installed with Dassault Platforms such as 3D Experience, CATIA, SOLIDWORKS, etc.
Facilities
- Dell Precision T5820XCTD base computer
- Lego Mindstorm EV3
- Poppy Humanoid
- Luzbot Taz6 3D printer
- DigiPro 5.0 3D printer
- 3D Experience software
Product Development Through Research

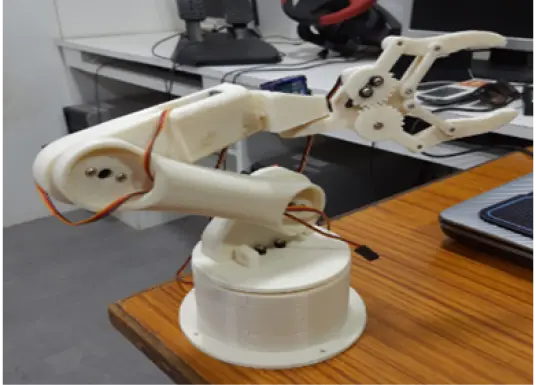
Hand gesture controlled Robotic Arm
This 3D printed robotic arm position is controlled through a hand glove that is attached with an MPU6050 Gyroscope and a flex sensor. The ARM uses 4 servo motor for robotic ARM movement. The Flex sensor is used to control the gripper servo of Robotic Arm and the MPU6050 is used for the movement of robotic in X and Y-axis. The robot moves in up, down, left or right directions and picks up objects from one place and keeps at another desired place as directed by the movements of fingers and hand.
Design of Mini URI0 Arm
Design of Mini URI0 Arm for pick and place operation- Building a small prototype which is open source robotic arm used in industries for various purposes.
5 Degrees of Freedom Robotic Arm
ABS was used to 3D print a robotic arm. Pick and place operations will be performed by this arm. Its weight is 200g. 6 servo motors and Arduino will be used to control the arm. The robot will be mathematically modeled to achieve different joint angles and hence different orientations
 +91 7058432258
+91 7058432258 